
|
|
|
|
|
| |
|
MÉTODOS
A amostragem foi realizada percorrendo-se, com uma embarcação, toda a área do reservatório a ser amostrada (zona central até a região de transição) através de transectos em zig-zag, com uma distância entre as linhas de amostragem proporcional ao tamanho da área a ser amostrada. Neste procedimento, dados de distribuição vertical e horizontal dos peixes serão coletados utilizando-se uma ecossonda científica digital Biosonic DT-X (Fig. 1). Este equipamento realiza varreduras na coluna d'água nas faixas de freqüência de 38, 70, 120, 200, 420 e 1000 kHz, possibilitando a determinação da estimativa da abundância, biomassa e espectro de tamanho dos organismos-alvo.

|
|
|
| |
Figura 1 - Ecossonda científica digital Biosonics DT-X® para biomonitoramento sub-aquático de recursos biológicos presentes na coluna de água (esquerda, em cima). Montagem um painel não condutivo de NYLON do Transdutor de 200 Khz que permite a obtenção de dados acústicos tanto de peixes quanto de grandes organismos do zooplâncton (direita, em cima). Todo o sistema Biosonics DT-X já em operação em Lagoa Santa em 21 de dezembro de 2007 (em baixo).
A sonda Biosonics DT-X possui uma variada gama de saídas que permite que ela seja conectada a dois transdutores, a um aparelho de posicionamento global D=GPS, a diferentes tipos de suporte de energia (corrente alternada ou contínua). Ela deve ainda ser acoplada a um lap top a partir de uma porta Ethernet (Fig. 2).
|
|
Figura 2 - Esquema de ligações externas da unidade CPU Biosonics para o trandutor, portal serial para o D-GPS, tomada de força (corrente alternada e contínua). A conexão com o lap top é feita com uma cabo de rede que fica na posição lateral da CPU da sonda (não visto na foto).
O uso da ecosonda Biosonics DT-X exigiu ainda o desenvolvimento de toda uma série de suportes de fixação para que o sistema
fosse fixado firmemente a qualquer tipo de chata ou barco de alumínio. O desenvolvimento desses suportes exigiu várias idas ao campo bem como o
teste de diferentes tipos de suportes (Fig. 3).
 |
 |
 |
 |
Figura 3- Suportes de fixação do transdutor da sonsa Biosonics DT-X (esquerda, em cima). Conversor de corrente contínua 12 V em corrente alternada (127 V) (em cima, à direita). D-GPS Trimble AGGPS 132 com o suporte da antena cinemática (esq., em baixo) e contrapesos necessários para a estabilização da embarcação (dir., em baixo). Todos os suportes e conexões necessários foram desenvolvidos e testados nas oficinas do ICB/UFMG.
O estudo hidroacústico foi realizado tanto no período diurno quanto à noite, dependendo da hioótese considerada em cada caso. Foi sempre utilizada a ecossonda Biosonics DT-X (Biosonics Inc.) equipada com um transdutor digital circular split-beam 6.6° de 200 kHz. A ecossonda digital estava acoplada a um sistema de posicionamento global diferencial (DGPS) AgGPS 132 (Trimble Co.). O receptor DGPS teve os dados corrigidos in situ, a partir da correção diferencial via satélite (OminSTAR Inc.). Assim, os dados de posicionamento colhidos pela unidade da embarcação foram corrigidos em tempo real, permitindo obter um erro menor do que 100 cm na posição do barco.
O transdutor split-beam foi montado em uma estrutura metálica na lateral do barco (Fig. 3), posicionado a aproximadamente 0.5 m abaixo da superfície da água e com o facho do sonar orientado verticalmente. Antes do início dos transectos foi realizada a calibração da ecossonda, utilizando-se esfera de carbeto de tungstênio de 36 mm. A esfera de calibração foi abaixada a aproximadamente 5 m abaixo do transdutor, posicionada no facho do sonar e, aproximadamente 2000 pings foram gravados para se estimar o índice de reflexão acústica individual (Target Strength - TS). O TS representa a razão entre a energia que é refletida por um alvo e a quantidade de energia que incide sobre esse alvo (MacLennan e Simmonds, 2005). Testes in situ indicaram que o transdutor estava calibrado corretamente e, portanto, não foram realizadas correções de calibração no transdutor. Para a classificação dos eco-registros, a ecossonda foi ajustada para uma duração do pulso de 0.4 ms e uma taxa de pulsos de 5.0 pings por segundo. Para assegurar a cobertura eficiente de toda a superfície do lago, uma varredura acústica foi conduzida em dez transectos paralelos e perpendiculares ao comprimento máximo do lago (Figura 1), sendo a velocidade de deslocamento da embarcação mantida em aproximadamente 10 km/h. O percurso total percorrido durante todo o estudo variou de 2 a 30 quilômetros, com diferentes graus de cobertura (d). No caso do estudo em Lagoa Santa, por exemplo, o valor de d foi de 6,6. O grau de cobertura da área (d), conforme proposto por MacLennan e Simmonds (2005), relaciona a extensão da varredura acústica com a superfície prospectada, sendo obtido através da equação:
onde, D = extensão da varredura acústica; e A = superfície prospectada. De acordo com estes autores, para um grau de cobertura adequado, o valor de "d" não deve ser inferior a quatro (4,0).
As informações processadas pela ecossonda foram visualizadas em tempo real e armazenadas em arquivos individuais para cada transecto com o auxílio de um computador laptop acoplado ao equipamento hidroacústico (via porta ethernet). O software Visual Acquisition versão 5.0 (Biosonics Inc.) foi utilizado na visualização, armazenamento digital, configuração e no controle de todo o sistema.
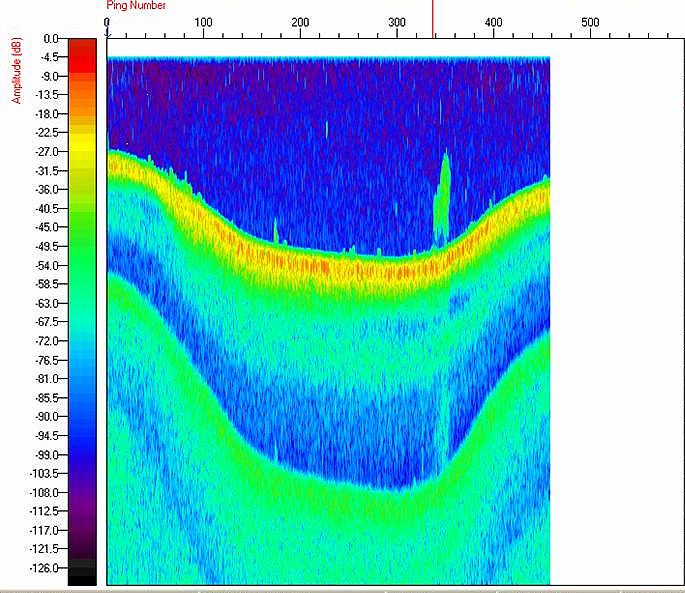
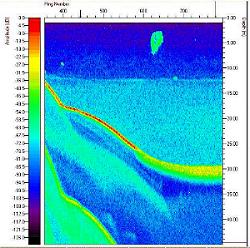
Figura 4 - perfil obtido com a sonda Biosonics DT-X no dia 26 de junho de 2008, na lagoa Malba visualizado com o software Visua Acquision. Pode-se ver a colna d´ água em azul escuro, os sedimentos em amarelo e vermelho. Peixes são vistos como traços verticiais na coluna de água. É fácil notar a presença de macrófitas submersas associadas aos sedimentos do lago.
Para o estudo das condições ambientais no dia da pesquisa acústica, medidas da temperatura da água (oC) e da concentração de oxigênio dissolvido (mg.l-1) foram sempre tomados da superfície ao fundo (através de perfil vertical a cada 0,5 m) da região mais profunda do lago, utilizando-se a sonda multi-parâmetros Yellow Springs (modelo YSI 556).
Pós-processamento dos dados acústicos
Os dados hidroacústicos foram submetidos a um pós-processamento através do software Visual Analyser versão 4.1 (Biosonics Inc.). O fundo do lago foi removido da análise através da edição manual no software. A análise da distribuição vertical e do espectro de tamanho dos peixes foi realizada pelo método de eco-contagem utilizando a amplificação de tempo crono-variado (função TVG - Time Varied Gain) 40 log R e o valor de limiar de energia acústica de -60 dB, para se omitir ecos de peixes menores do que 2 cm e outros ecos não desejáveis como bolhas de ar e larvas de insetos. Na eco-contagem obtêm-se diretamente o número de peixes observados e, a partir daí, a estima-se a secção de retroespalhamento acústico (sigma ou sbs) médio dos alvos (peixes) que corresponde à superfície efetiva de reflexão de energia acústica dos mesmos, considerando um padrão de reflexão esférica, e está relacionado ao índice de reflexão acústica individual (Target Strength - TS).
O comprimento dos peixes foi estimado a partir da equação de Love (1977):
TS = 19.4 Log (L) - 0.9 Log (F) - 63.7
Onde,
TS = reflexão acústica individual em decibéis (dB re 1m2); L = comprimento total do corpo em centímetros (cm) e F = freqüência em quilohertz (kHz)
Trata-se de uma fórmula de conversão generalizada que se adapta à maioria das espécies tipicamente encontrada em lagos. A análise da densidade de peixes foi realizada utilizando-se a técnica de eco-integração, através da amplificação (TVG) 20 log R, onde a voltagem total refletida pela eco-integração foi convertida nas densidades absolutas por unidade de área pelo escalonamento dos valores de voltagem em relação ao valor médio do sigma determinado na eco-contagem para o transecto. Ao final do pós-processamento foi obtido o número de peixes em cada transecto que, através da área percorrida e volume observado (volume do facho do sonar), converteu-se em valores de densidade por unidade de área (ind./hectare). Na espacialização da distribuição de densidade dos peixes, foi utilizado o método de interpolação kriging, utilizando-se o programa Surfer versão 8.0 (Golden Software Inc.). Este método geoestatístico tem sido proposto por vários autores (p. ex., Swierzowski, 2003; Monteoliva e Schneider, 2005), para a interpolação de dados de abundância de peixes.

Prof. Ricardo Motta Pinto Coelho
RMPC Consultores em Recursos Hídricos
Rua das Hortęnsias, 800
CEP 34.000-000 NOVA LIMA (MG)
Telefax: 0XX 31 3517 9793
E-mail: rpcoelho@globo.com
Última atualização em 16 de agosto de 2017
Todos os direitos reservados.

